Lets review robot projects from the community.
Building a robot from scratch can be a daunting task. To understand what is possible, and to gain inspiration, I researched various projects from the community. This article presents a list of robots with different actuators, sensors and capabilities. I also detail the hardware and software that is used in these projects.
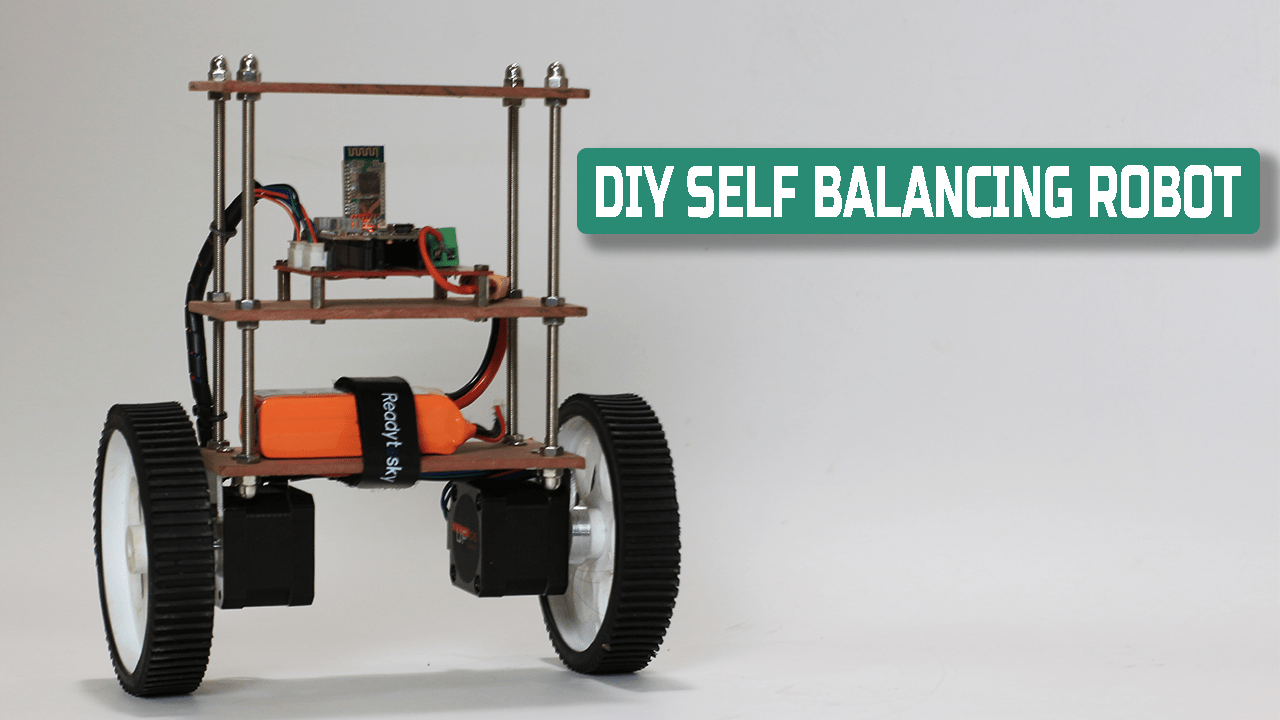
Two Wheel Self-Balancing Robot
Source: https://electricdiylab.com/diy-self-balancing-robot/
Features
- Self balancing when external force is applied
- Can be controlled via App
Hardware
- Arduino Nano
- 2 Nema 17 Stepper Motors
- 2 A4988 Motor Control Units
- Bluetooth Module HC-05
- Gyro Sensor MPU6050
Software
- Custom balancing firmware based on firmware for quad-copter/multi-rotor flying
- Android app for Bluetooth connection (not maintained anymore)
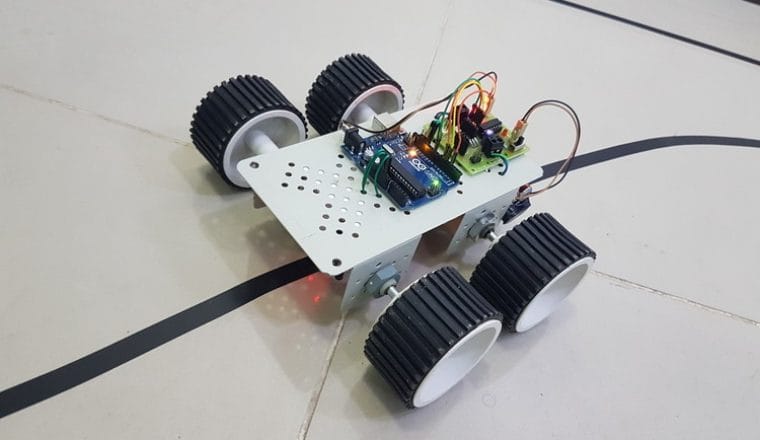
Self-Moving Line Following Robot
Source: https://www.electronicshub.org/arduino-line-follower-robot/
Features
- Follows a printed black line on the ground
Hardware
- Arduino UNO or Nano
- L293D Motor Driver
- Custom Build IR Sensor Module (IR LED, Photo Diode)
- Geared Motors
Software
- Custom Arduino code for Motor controller
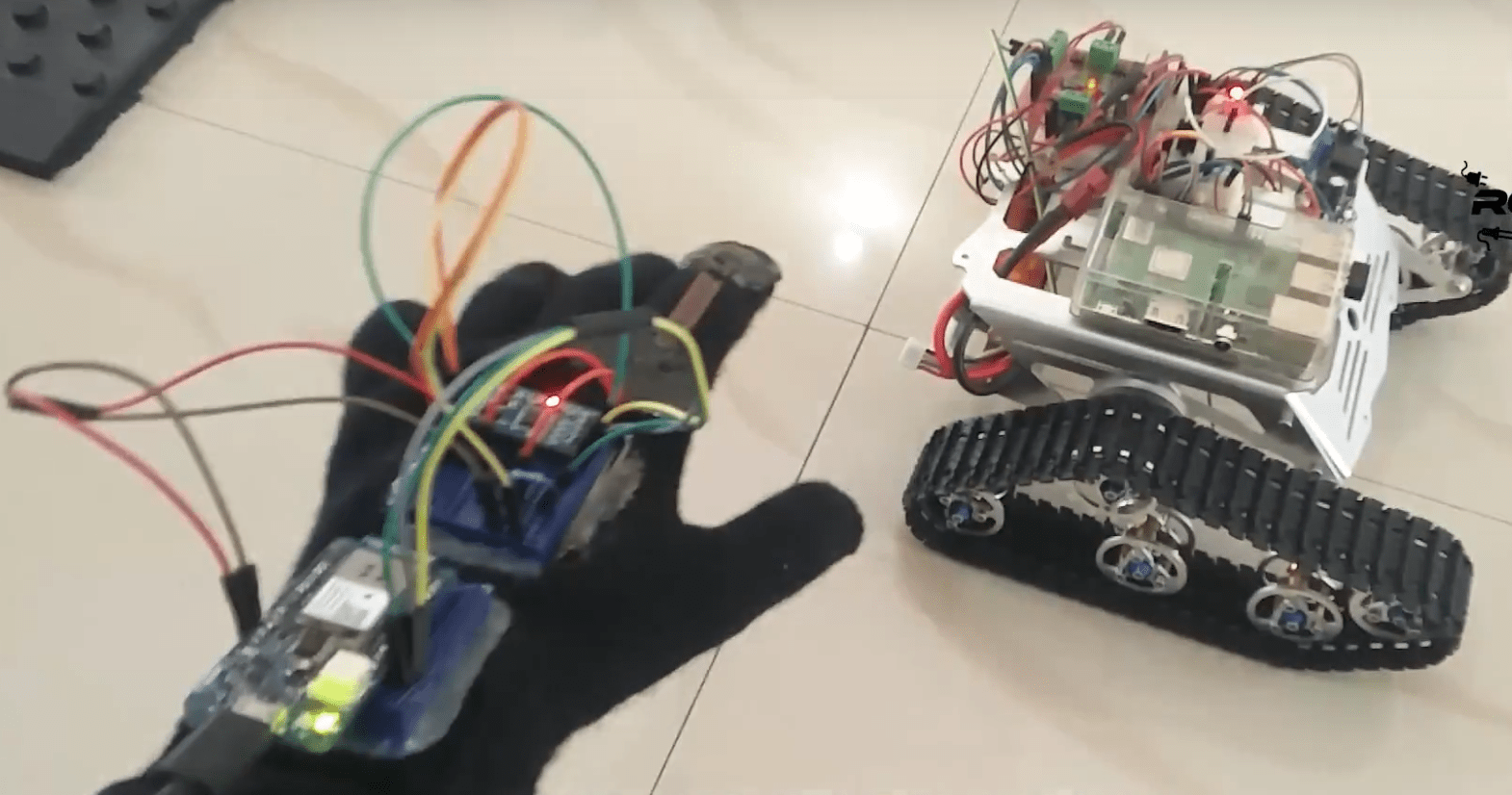
Gesture Controlled Self-Moving Robot
Source: https://rootsaid.com/spinelcrux-gesture-controlled-robot-1/
Features
- Gesture Controlled
- Selfmade controlling glove
- Moves by Tracks
Hardware
- Glove
- Arduino MKR1000
- MMA7361 accelerator
- Flex sensor
- Breadboard
- Robot
- DIY tank Kit
- Raspberry Pi 3
- Motor controller: Breadboard & L293D driver board
- Raspberry Pi camera module V2-8 Megapixel
Software
- Custom Arduino code for motor controller
- Custom Arduino code for glove gestures
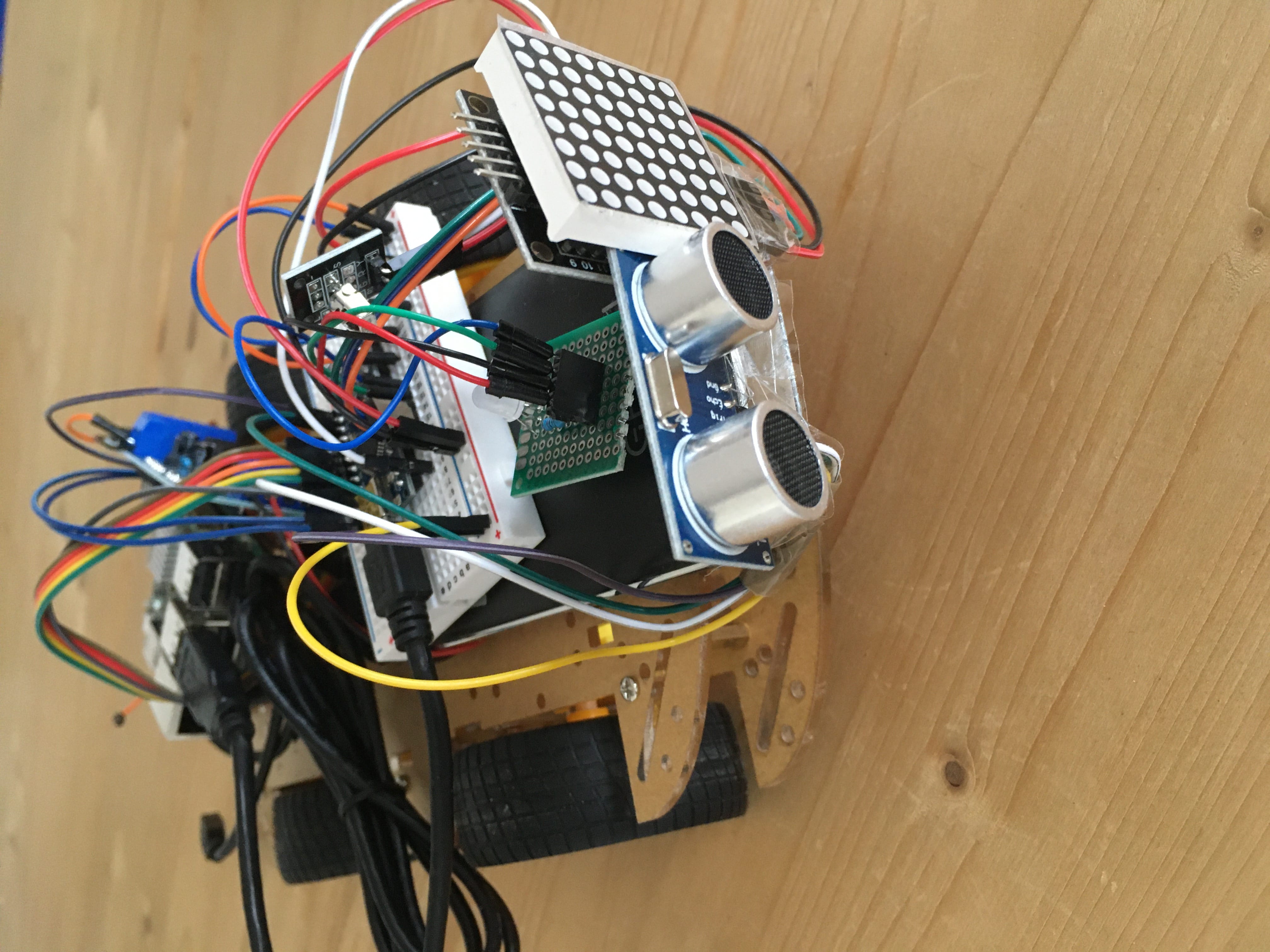
Pickup & Deliver Voice Controlled
Source: https://www.instructables.com/Object-Finding-Personal-Assistant-Robot-Ft-Raspber/
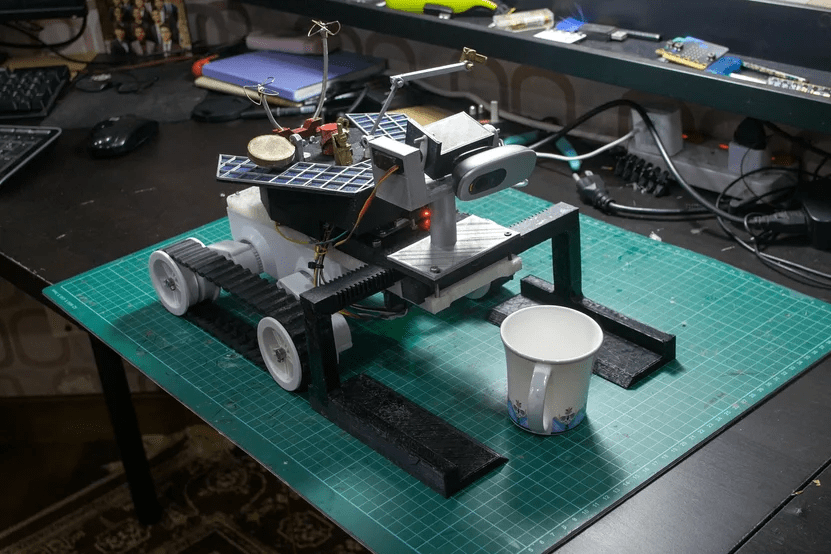
Features
- Voice controlled
- Object recognition
- Distance measuring with ultra-sonic waves
- Moves by tracks
- Picks objects with shovels
Hardware
- Rover 5 platform
- Raspberry Pi 3b
- Geared Brush DC
- USB Webcam
- Google Coral USB
- Ultrasonic distance sensor
- Stepdown converter
Software
- Voice recognition: Snowboy Hotword Detection - closed 2020-12-31
- Robo claw Controller: Basicmicro Python library.
Self-Navigating Robot
Source: https://github.com/RBinsonB/Nox_robot

Features
- Controlled by shell commands
- Automapping of its environment
- Self-Navigating
Hardware
- Raspberry Pi 3b
- Arduino MEGA 2560, Adafruit motor shield
- Kinect
- Custom 2-wheel, 2-caster
Software
- ROS
- Navigation: ROS navigation
- Surrounding mapping: Simultaneous Localization and Mapping (SLAM)
- Self-Navigation: TEB local planner
- Camera: Freenect
Self Navigating Image Recognizing Robot
Source: https://www.youtube.com/watch?v=U0--ZJfmUEM
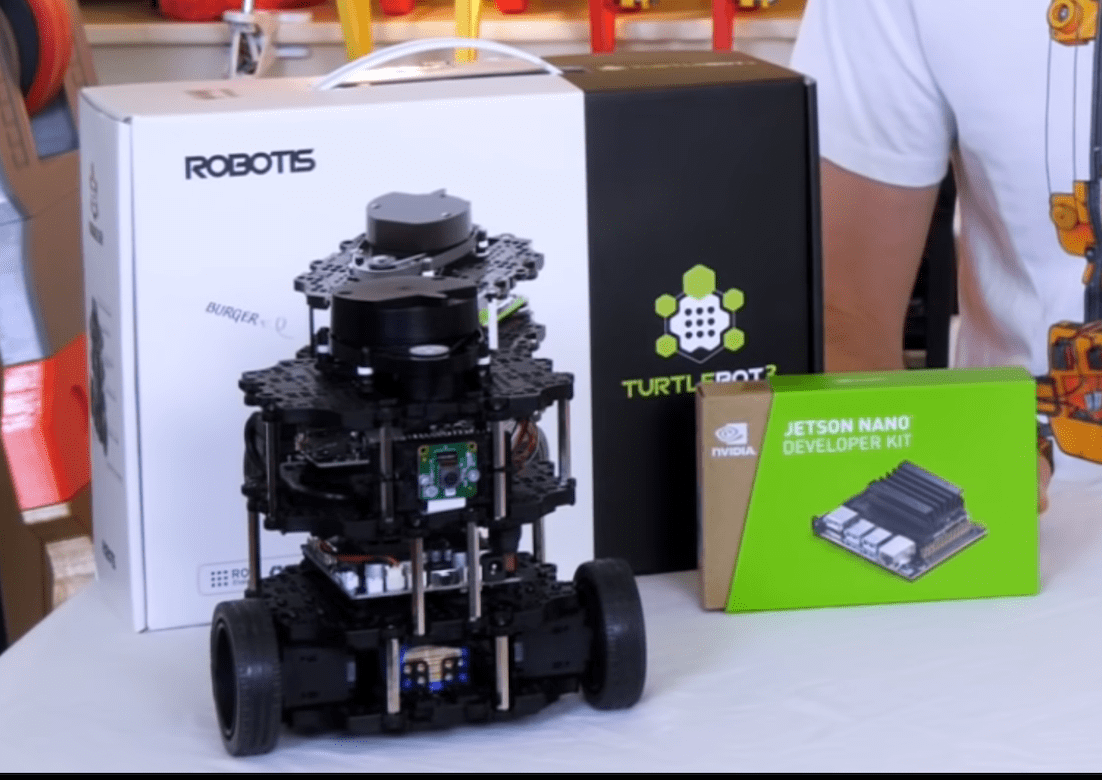
Features
- Controlled by Custom Remote Controller (Touch Screen/Joysticks)
- Automapping of its environment
- Self-Navigating
- Object recognization
Hardware
- Chassis
- robotis Turtle Bot 3
- Raspberry Pi 3B+ microcontroller
- Raspberry Pi Camera
- Dynamixel wheels
- LiDAR Sensor
- Image recognition
- NVidia Jetson Nano
- Additionally
- Raspberry Pi4 based custom remote control
Software
- ROS
- Navigation: ROS navigation
- Surrounding Mapping: Simultaneous Localization and Mapping (SLAM)
- Laser Sensor
Conclusion
This article showed various robot projects: Self-navigatin robots that detect objects and humans, which can be controlled with apps, voice or gestures. These projects are a great inspiration, and with the software and hardware that they use, you can build a robot on your own too.